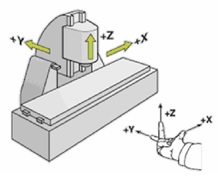
Souřadný systém XYZ je definován v souladu s normami ISO jako pravoúhlý, pravotočivý. Osa Z je vždy rovnoběžná s osu vřetene, osa X vždy leží v rovině upínacího stolu. Souřadný systém pro svislou i vodorovnou polohu vřetene včetně vyznačení kladných směrů je na následujícím obrázku.
Počátek souřadného systému tzv. nulový bod stroje je dán polohou referenčních spínačů umístěných na všech osách. Souřadný systém má trvalou platnost i po vypnutí řídicího systému. V případě havárie například výpadkem elektrického proudu se souřadný systém obnoví pomocí funkce G98 (najetí do referenčního bodu).
Pozor: Po vypnutí napájení motorů dojde vždy ke ztrátě vazby krokových motorů, která se obnoví po opětovném zapnutí napájení. Toto obnovení může vnést do souřadného systému chybu rovnající se třem inkrementům pohybu. Proto nedoporučujeme během přesných prací vypínat v přestávkách napájení motorů.
Nulový bod umístěný v krajních polohách pojezdu stroje většinou nevyhovuje pro praktické užití. Zde je třeba použít nový souřadný systém s počátkem v některém důležitém bodu obrobku nebo upínače. Často se jako počátek pracovního souřadného systému volí roh polotovaru (v našem případě je to nejčastěji levý dolní roh na povrchu polotovaru) případně to může být osa otvoru. Pro přechod do nového souřadného systému (a pro návrat do systému původního) je možno použít funkce G51 (nastavení lokálního souřadného systému) a G50 (zrušení lokálního souřadného systému).
